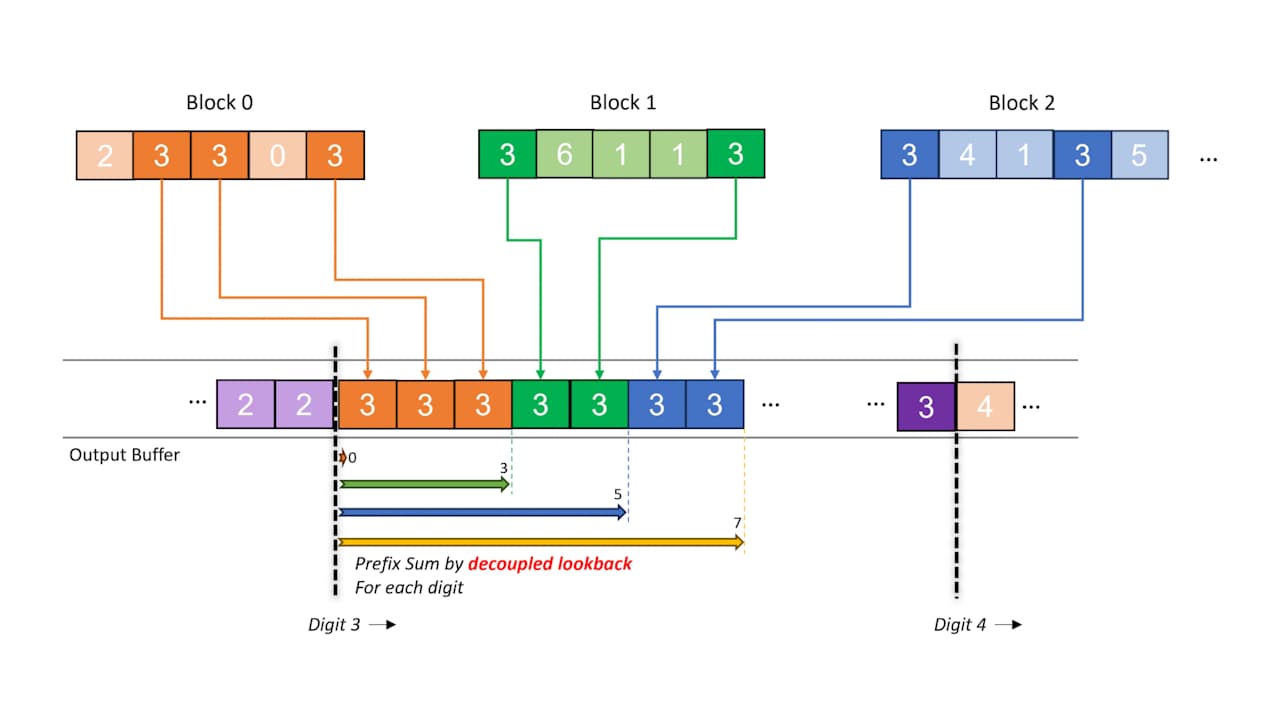
AMD FidelityFX™ Parallel Sort
AMD FidelityFX Parallel Sort 使 GPU 上的数据排序更快、更容易。使用我们的 SM6.0 计算着色器来排序您的数据。
本页内容
四元数定义为Q:a+bi+cj+dk=(r,v)=(Qw,Qx,Qy,Qz)
1−2(Qy2+Qz2)2(QxQy+QzQw)2(QxQz−QyQw)02(QxQy−QzQw)1−2(Qx2+Qz2)2(QyQz+QxQw)02(QxQy−QzQw)2(QxQz+QyQw)2(QyQz+QxQw)1−2(Qx2+Qy2)02(QxQz−QyQw)2(QyQz+QxQw)1−2(Qx2+Qy2)00001轴-角定义为U:cos(θ)+sin(θ)(u^x,u^y,u^z)
其中:∣∣u^∣∣=1
(1−c)u^x2+c(1−c)u^xu^y+su^z(1−c)u^xu^z−su^y0(1−c)u^xu^y+su^z(1−c)u^xu^y+su^x(1−c)u^yu^z+su^x0(1−c)u^xu^y−su^z(1−c)u^y2+c(1−c)u^yu^z+su^x0(1−c)u^xu^y−su^z(1−c)u^yu^z−su^x(1−c)u^z2+c00001由平面 P:ax+by+cz+d=0
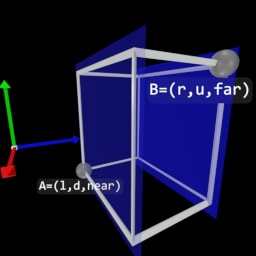
1−2a2−2ab−2ac−2ad−2ab1−2b2−2bc−2bd−2ac−2bc1−2c2−2cd0001l - 投影截头体左坐标
r - 投影截头体右坐标
b - 投影截头体底坐标
t - 投影截头体顶坐标
n - 投影截头体近平面距离
f - 投影截头体远平面距离
w - 投影截头体近平面宽度
h - 投影截头体近平面高度
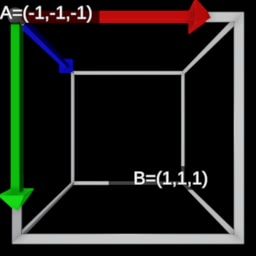
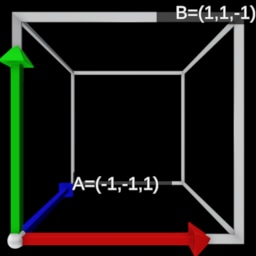
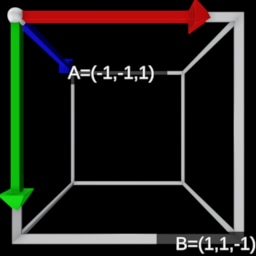
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
 |  | 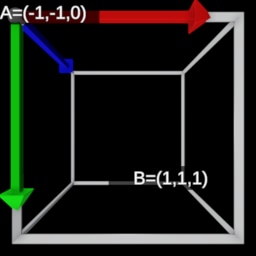 |
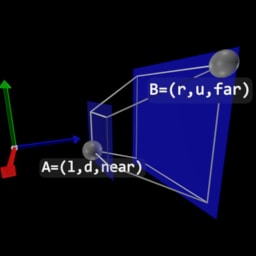
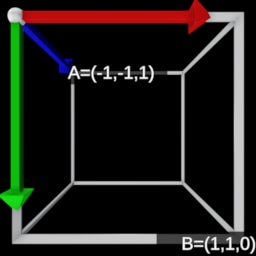
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
|  |  |
l - 透视视锥体的左坐标
r - 透视视锥体的右坐标
b - 透视视锥体的底坐标
t - 透视视锥体的顶坐标
n - 透视视锥体近平面距离
f - 透视视锥体远平面距离
w - 透视视锥体近平面宽度
h - 透视视锥体近平面高度
α - 透视视锥体左右视平面夹角
β - 透视视锥体顶底视平面夹角
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
 | | |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
 | | |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
|  |  |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
| | |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
| | |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
| | |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
|  |  |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
| | |
l - 投影截头体左坐标
r - 投影截头体右坐标
b - 投影截头体底坐标
t - 投影截头体顶坐标
n - 投影截头体近平面距离
f - 投影截头体远平面距离
w - 投影截头体近平面宽度
h - 投影截头体近平面高度
jx x方向上的NDC空间抖动
jy y方向上的NDC空间抖动
l - 透视视锥体的左坐标
r - 透视视锥体的右坐标
b - 透视视锥体的底坐标
t - 透视视锥体的顶坐标
n - 透视视锥体近平面距离
f - 透视视锥体远平面距离
w - 透视视锥体近平面宽度
h - 透视视锥体近平面高度
jx x方向上的NDC空间抖动
jy y方向上的NDC空间抖动
α - 透视视锥体左右视平面夹角
β - 透视视锥体顶底视平面夹角
at - 相机指向的目标点位置
eye - 相机位置
up - 相机的“向上”方向
C - “向前” 向量
A - “右边” 向量
B - “向上” 向量
C=∥at−eye∥at−eye A=up×C B=C×A
AxAyAz0BxByBz0CxCyCz0−(A⋅eye)−(B⋅eye)−(C⋅eye)1dir - 相机的期望方向
up - 相机的“向上”方向
C - “向前” 向量
A - “右边” 向量
B - “向上” 向量
C=dir A=up×C B=C×A
AxAyAz0BxByBz0CxCyCz0−(A⋅eye)−(B⋅eye)−(C⋅eye)1平面定义为 P:Ax+By+Cz+D=0
光源位置 L:(Lx,Ly,Lz)
其中 w=0 代表方向光
w=1 代表点光源
L=(Lx,Ly,Lx,w) P=(A,B,C,D) k=P⋅L
k−PxLx−PyLx−PzLx−PwLz−PxLy−PyLzk−PzLy−PwLz