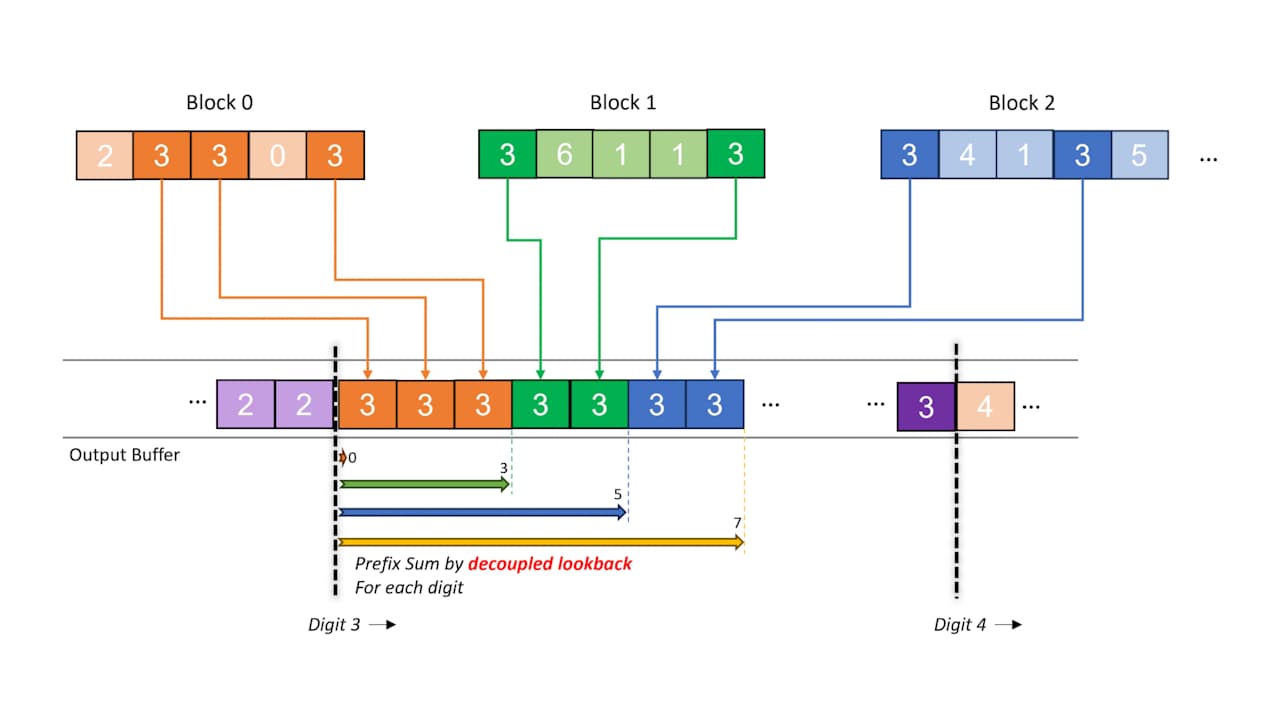

AMD FidelityFX™ Parallel Sort
AMD FidelityFX Parallel Sort 使 GPU 上的数据排序更快、更容易。使用我们的 SM6.0 计算着色器来排序您的数据。
四元数定义为
轴角定义为
其中
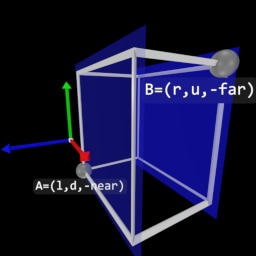
平面定义为
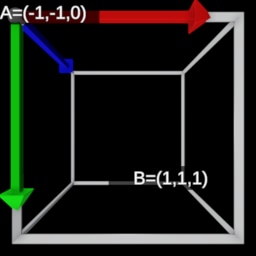
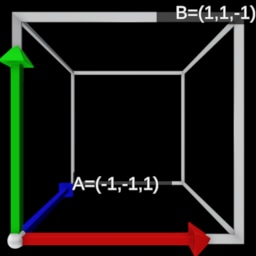
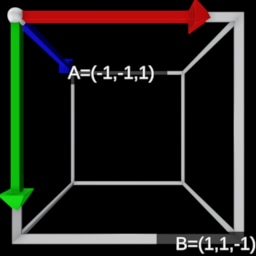
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
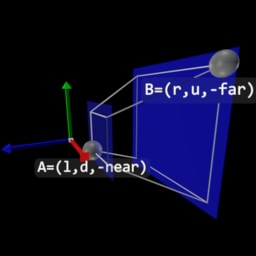 |  | 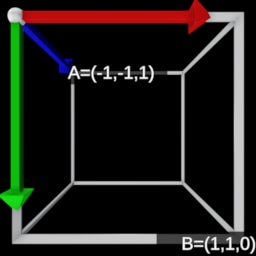 |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
 | | |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
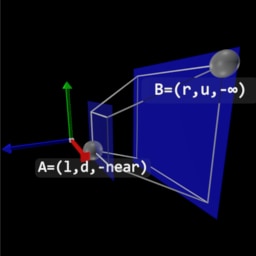
|  | 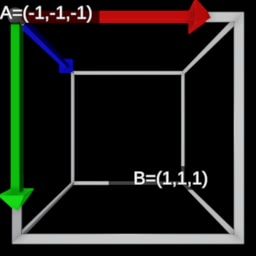 |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
| |  |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
|  |  |
| 视图空间 | 左手 NDC 空间 | 右手 NDC 空间 | |
|---|---|---|---|
| | |
- 视锥体的左坐标
- 正射投影视锥体的右坐标
- 正射投影视锥体的底坐标
- 正射投影视锥体的顶坐标
- 正射投影视锥体近平面距离
- 正射投影视锥体远平面距离
- 正射投影视锥体近平面宽度
- 正射投影视锥体近平面高度
- NDC空间中的x方向抖动
- NDC空间中的y方向抖动
- 近平面左侧坐标
- 近平面右侧坐标
- 近平面底部坐标
- 近平面顶部坐标
- 近平面到观察点的距离
- 远平面到观察点的距离
- 近平面宽度
- 近平面高度
- NDC空间中的x方向抖动
- NDC空间中的y方向抖动
- 近平面左、右平面的夹角
- 近平面上、下平面的夹角